Grid Detect Then Xray Centre#
The aim of this page is to provide a general overview of the grid_detect_then_xray_centre_plan.
The code for the grid_detect_then_xray_centre plan is now entirely mx-bluesky/common/ and dodal. There is an i04 entry point that calls the common plan.
There are then a number of plans that make up the grid_detect_then_xray_centre_plan plan. Some important ones:
grid_detection_plan - Use the OAV to optically calculate a grid for a scan that would cover the whole sample.
flyscan_xray_centre_plan - Triggers a hardware-based grid scan and moves to the X-ray centre as returned from
zocalo.grid_detect_then_xray_centre_plan - This top-level plan performs an OAV grid detection then a flyscan x-ray centre.
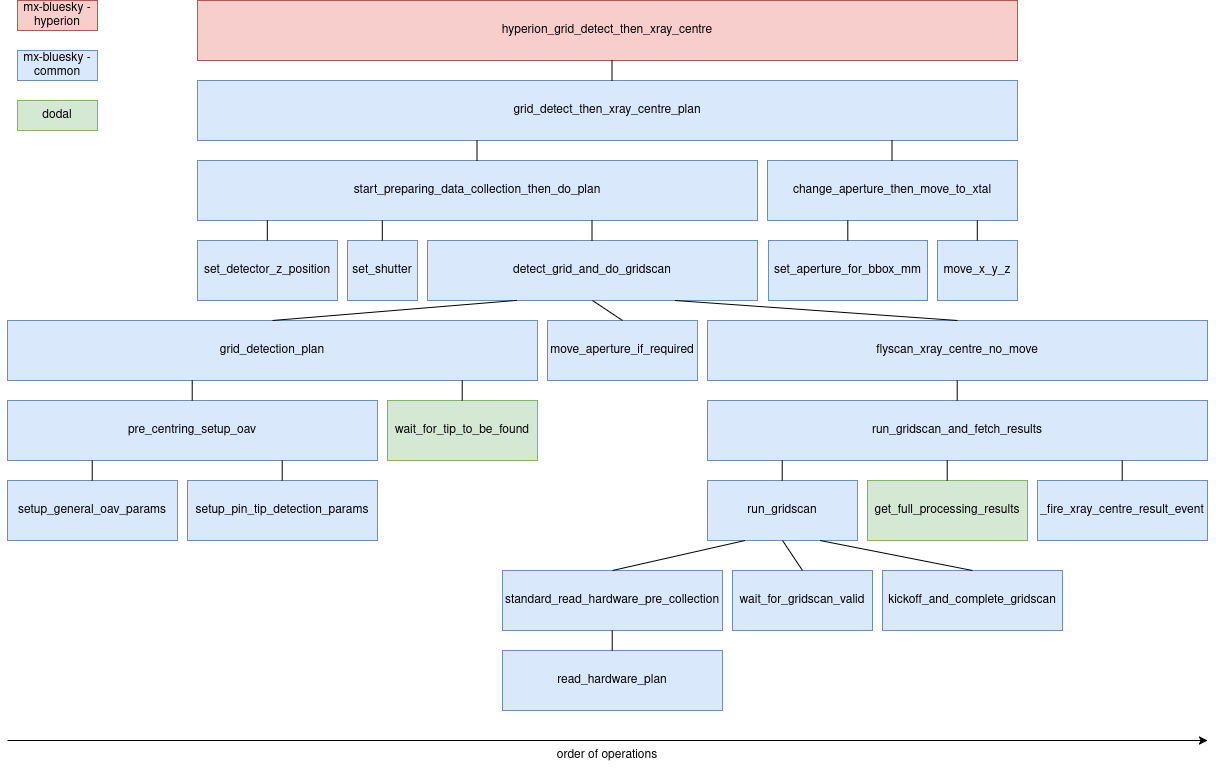
The diagram below shows all the plans that make up the grid_detect_then_xray_centre_plan.
Grid Detect Then Xray Centre Plan#
This plan does the following, in roughly this order:
If called standalone, start preparing for data collection.
Move the beamstop into place if it isn’t already.
Perform an OAV grid detection.
Convert the parameters calculated in step 2 into something we can send to the flyscan X-ray centre.
Move the backlight out, set the aperture to small, and wait for the detector to finish moving.
Perform a flyscan X-ray centre.
Move the sample based on the results of step 5.
OAV Grid Detection#
This plan does the following, in roughly this order:
Move to omega 0.
Calculate the 2D grid size using the edge arrays from the OAV.
Trigger the OAV device to take snapshots, both with and without the grid.
Read the snapshot paths (which will be gathered for ispyb in the background).
Repeat steps 2–4 for omega 90.
Return the grid positions.
Flyscan Xray Centre No Move#
This plan does the following, in roughly this order:
Move to the desired transmission (and turn off xbpm feedback).
Move to omega 0.
Read hardware values for ispyb (a grid scan entry will be added in the background).
Set up zebra and motion devices for a grid scan to be done in the motion controller.
Wait for the Eiger to finish arming or arm the Eiger if it hasn’t already been done.
Run the motion control grid scan.
Wait for the grid scan to end.
Retrieve the X-ray centering results from
Zocalo(which will be gathered in the background).